
خودرو خودران چیست و آنچه باید از autonomous car بدانید؟!
فناوری خودرو های خودران
فناوری خودروهای خودران در دو دهه اخیر بسیار گسترش پیدا کرده اند و اثرات مختلفی بر جنبه های مختلف حمل ونقل و ترافیک از جمله اثرات بر پارامترهای عملکردی، ایمنی، زیست محیطی و اجتماعی را به همراه داشته است. به این ترتیب ارزیابی اثرات این نوع خودروها بر جنبه های مختلف حمل ونقل، همانطور که در قبل اشاره شد، دارای اهمیت بالایی است.
خودرو خودران چیست؟
خودروهای خودران به خودروهایی گفته می شود که بدون دخالت راننده از طریق سیستم های کنترلی پیشرفته به سمت مقصد حرکت می کنند. خودروی خودران خودرویی است که در حالی که در آن نشسته اید با یک فرمان ساده میتوانید به آن بفهمانید که کجا می خواهید بروید و این فرمان را با یک دکمه اجرا کنید و ماشین شما بدون دخالت راننده به مقصد می رسد. در این ماشین هایی که با هوش مصنوعی طراحی شده اند می توانید کارهای زیادی انجام دهید. به عنوان مثال، می توانید با صدای خود به ماشین خود دستور دهید تهویه مطبوع را روشن کند، میزان درجه آن را بالا یا پایین بیاورد یا جالبتر اینکه موسیقی مورد علاقه خود را پخش کند و حتی شما را ماساژ دهد. تمام قطعات این خودروها هوشمند هستند و شما واقعا یک ربات خریده اید، نه یک ماشین ساده…
خودروهای خودران چگونه کار میکنند؟
هنگامی که راننده بهمنظور رانندگی روی صندلی خودرو مینشیند، همزمان با مشاهده محیط پیرامون خود اطلاعاتی را از آن دریافت میکند. از این اطلاعات بهعنوان ورودی دریافت و برای تصمیمگیری درمورد جهت چرخش فرمان، زمان ترمز گرفتن و فعالیتهای مربوط به رانندگی استفاده میشود. معمولا خودروهای خودران به یک سیستم ناوبری، سیستم مکانیاب و تعدادی حسگر مجهز هستند. این ماشینها اطلاعات مربوط به موقعیت مکانی را از سیستم مکانیاب دریافت میکنند و بهمنظور جانمایی خودشان از سیستم ناوبری و اطلاعات ورودی حسگرها استفاده میکنند. تمام مراحل با هدف ساختن نقشهای داخلی از محیط پیرامون، انجام میشوند. سپس از این نقشه برای یافتن مسیر بهینه، دوری از هرگونه مانع و رسیدن به مقصد استفاده میشود.

هوش مصنوعی بهکار رفته در ماشینهای خودران، باید در هر لحظه، محیط پیرامون خود را درک کند. سپس با استفاده از موقعیت جغرافیایی و مسیری که مشخص شده است، شروع به حرکت کند. همچنین علاوهبر درک محیط پیرامون، باید کنترل خودرو را بهخوبی انجام دهد. بهعنوان مثال خودروی جلویی شما سرعت خود را کاهش میدهد، در اینهنگام با پردازش سرعت و فاصله خودرو جلویی، تصمیم میگیرد که چه اقدامی کند. در حالتکلی رانندگی به سه بخش دیدن و جمعآوری اطلاعات از محیط پیرامون، تصمیمگیری با توجه به اصول و درنهایت اجرای تصمیمها و فرمانهای کنترلی تقسیم میشود. اصول تصمیمگیری شامل حفظ جان افراد، رعایت قوانین راهنمایی و رانندگی و در نهایت یافتن مسیر درست حرکت در شرایط مختلف میشود. بنابراین وظیفه یک خودرو خودران جمعآوری دادههای معتبر و قابل اعتماد و تصمیمگیریهای مناسب براساس آنها است.
دیدن، شنیدن و فاصلهسنجی
برای کنترل خودرو به انواع مختلف دادهها نیاز داریم؛ حتی یک رایانه هم باید ببیند، بشنود و درک کند تا بتواند براساس درک خود از محیط تصمیم بگیرد. بهعنوان مثال حدود و اندازه جاده، موقعیت پیچ، موقعیت مکانی و فاصله خودروهای دیگر، تشخیص سرعت وسایل نقلیه موجود در مسیر، موقعیت مکانی عابران پیاده و اشیا و میزان ترافیک، اطلاعاتی هستند که یک رایانه به آنها نیاز دارد. زیرا یک راننده درهنگام رانندگی تمام نکات مهم را رعایت میکند.
سنسورهای صوتی بهمنظور تشخیص فاصله
برای اندازهگیری فاصله یک خودرو از خودروهای دیگر، سنسورهای صوتی مجهز به بهترین تکنولوژی خودرو برروی آنها نصب میشود. نحوه کار آنها بهگونهای است که با ارسال امواج صوتی و دریافت بازتاب آن، با توجه به مدت زمان بازگشت بازتاب فاصله اجسام را تشخیص میدهند.
استخراج اطلاعات مفید از دادههای سنسورها
در حقیقت سنسورها فقط مرحله ابتدایی برای تکمیل خودروهای خودران محسوب میشوند. در این مرحله و برای تجزیه و تحلیل دادههای دریافتی، از هوش مصنوعی کمک میگیرند. امروزه از هوش مصنوعی بهصورت گسترده و برای تشخیص چهره، تشخیص وسایل، طبقهبندی اشیا، تشخیص صدا و تصاویر استفاده میشود.
تصمیمگیری براساس قوانین و اصول رانندگی
پس از آن که اطلاعات توسط کامپیوتر و هوش مصنوعی موجود در سیستم خودروهای خودران تحلیل شد، نوبت به تصمیمگیری میرسد. این ماشینها براساس دادههای یک نقشه، جاده و مسیر را انتخاب و با کمک گرفتن از تصاویر خارج ماشین، آن را هدایت میکنند.
اجرای تصمیمها و فرمانهای کنترلی
درنهایت پس از بررسی و درک محیط اطراف و تصمیمگیری براساس دادههای جمعآوری شده، خودرو باید تصمیمها و فرمانهایی که توسط سیستمهای کنترلی صادر شدهاند را به درستی اجرا کند تا فرآیند رانندگی تکمیل شود.برای مثال دستورات حرکتی خودرو میتواند شامل کنترل گاز و ترمز و همچنین کنترل میزان زاویه چرخش فرمان باشد.
مزایا و معایب خودروهای خودران

بهبود امنیت ترافیک
تحقیقات نشان میدهند که ۹۰ تصادفات به دلیل اشتباهات انسانی اتفاق میافتد؛ که ۲۰ تا ۳۰ درصد از این میزان، ناشی از حواسپرتی رانندگان در حین رانندگی است. گزارشات نشان میدهند که استفاده از خودروهای خودران در سیستم حملونقل شهرها باعث میشود درصد تصادفات تا حد بسیار زیادی کاهش یابد. بهطوریکه این میزان بهشدت قابلتوجه است؛ و بسیاری از کارشناسان و متخصصان معتقد هستند که حضور این اتومبیلها در خیابانها موجب کاهش قابلتوجه تصادفات خودرویی میشود.
حملونقل بهینه
وجود ترافیکهای بسیار سنگین به یکی از بزرگترین دغدغهها تبدیل شده است. حضور ماشینهای شخصی در کنار سیستم حملونقل عمومی، موجب شدت یافتن این ترافیک میشود. طبق تحقیقات، اتومبیلهای خودران میتوانند حملونقل عمومی را بهبود ببخشند. همچنین با افزایش کیفیت، کاهش هزینهها را به همراه داشته باشند. علاوهبر تمام این مزیتها، میتوانید درهنگام گیر افتادن در تله یک ترافیک سنگین از زمان خود به بهترین شکل ممکن استفاده کنید.
امکان سرقت اطلاعات
یکی از معایب این اتومبیلها این است که هکرها میتوانند اطلاعات موجود در سیستم آنها را سرقت کنند. سپس با هک سیستم خودرو کنترل آن را در دست بگیرند. در اینهنگام یک اتومبیل بدون راننده میتواند مانند یک اسلحه برای آسیب رساندن به عابران پیاده یا تصادفات عمدی استفاده شود. دلیل این امر وجود سیستمهای نرمافزاری در خودروهای خودران است. البته شرکتهای فعال این حوزه علاوه بر تلاش برای پیشرفت و بهبود عملکرد بخشهای فنی، برای افزایش امنیت این خودروها هم تلاش میکنند و این یکی از مهمترین دغدغههای آنان است.
حملونقل مقرونبهصرفه
با توجه به تصمیمات و گفتههای شرکتهای سازنده خودروهای خودران، انتظار میرود اتومبیلهای بدون راننده هزینه کمتری برای جابهجایی درخواست کنند. زیرا دیگر خبری از راننده انسانی نخواهد بود. از سوی دیگر بهرهمندی از اینگونه سرویسها هزینه کمتری نسبت به خرید یک خودرو معمولی خواهند داشت.
ارزیابی اثرات خودروهای خودران
به طورکلی میتوان گفت روشهای مختلفی برای ارزیابی اثرات خودروهای خودران در ادبیات پیشنهاد شده است که میتوان آنها را در سه دسته مدلهای تئوری و ریاضیاتی، شبیه سازی و مدلهای آزمایشگاهی یا واقعی تقسیم بندی کرد. در مدلهای تئوری و ریاضیاتی به دلیل ساده سازی هایی که در فرضیات آنها وجود داشت، در نتایج انحرافات زیادی مشاهده میشد ولی با گذشت زمان در چند سال اخیر با پیشرفت سیستمهای تحلیلی و پردازشی، سیستم های شبیه سازی گسترش پیدا کردند و به نسبت مدلهای اولیه نتایج دارای دقت به مراتب بیشتری بودند. مدلهای آزمایشگاهی و یا واقعی نیز دارای مشکالت عمدهای بودند.
یکی از مشکلات اصلی مدلهای آزمایشگاهی در بحث ایمنی آنها مشاهده شد. به دلیل وجود نقص هایی متعدد در سیستمهای راهبری مدلهای واقعی خودروهای خودران امکان آزمایش آنها در محیط با حضور خودروهای با راننده نیست و در حال حاضر روشهای شبیه سازی کاربرد بیشتری پیداکرده اند. از دیگر مزایای روش شبیه سازی جریان ترافیک میتوان به امکان ارزیابی سناریوهای مختلف بدون متحمل شدن هزینه های گزاف، مدل سازی در محدوده های ترافیکی بزرگ (به عنوان نمونه در مقیاس یک شهر)، تحلیل حساسیت انواع پارامترهای تأثیرگذار، ارزابی توانایی های ارتباطی بین وسایل نقلیه، ارزیابی اثرات خودروهای با راننده و بدون راننده در درصدهای مختلف حضور آنها و دیگر موارد اشاره کرد.
چند مفهوم مهم در راستای خودروهای خودران
1. خودروی متصل و خودکار
خودروی متصل به خودرویی گفته میشود که فقط از طریق توانایی ارتباطی قادر به دریافت اطلاعات به منظور راهبری خودرو است. مهمترین توانایی های ارتباطی را میتوان به سه دسته ارتباط وسیله نقلیه با وسیله نقلیه، ارتباط وسیله نقلیه با زیرساخت و ارتباط وسیله نقلیه با سایر کاربران تقسیم بندی کرد. خودروی خودکار به خودرویی گفته میشود که دارای توانایی ارتباطی نیست و فقط از طریق سنسورها، رادار،لایدار (LIDAR) و پردازش تصویر اطلاعات موردنظر را دریافت کرده و خودرو را راهبری میکند.
2.سطوح خودروهای خودران
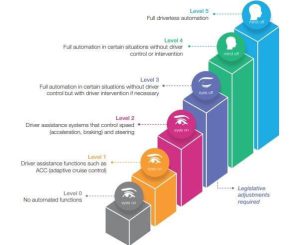
خودروهای خودران طبق تقسیم بندی انجمن مهندسان خودرو به شش سطح تقسیم بندی میشوند. در سه سطح اولیه (سطوح صفر، یک و دو) راننده بایستی به صورت ناظر همواره هوشیاری خود را حفظ کرده تا در مواقع موردنیاز کنترل وسیله نقلیه را به دست گیرد. در سه سطح بعدی (سطوح سه، چهار و پنج) راننده دخالتی در هدایت وسیله نقلیه ندارد حتی اگر روی صندلی راننده نشسته باشد. نکته جالب در سطح سه وجود دارد این است که سیستم در مواقعی که دیگر نمیتواند به تنهایی کنترل وسیله نقلیه را در دست گیرد، سیستم در صفحه نمایش راننده پیغام فوری را صادر میکند و پس از چند ثانیه کنترل وسیله نقلیه را به راننده منتقل میکند.
تأثیر ایمنی این موضوع و راهکار پیشنهادی در تحقیقات صورت گرفته است. دسته بندی سطوح خودروهای خودران در شکل زیر مشخص شده است:
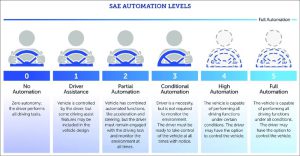
در ارزیابی خودروهای خودران بایستی به دو نکته دقت شود. اول اینکه خودروی خودران موردنظر در چه سطحی از سطوح شش گانه که در بالا ذکر شد قرار دارد. دوم اینکه آیا نیاز است که رفتار متقابل بین خودروهای با راننده و خودروهای بدون راننده در نظر گرفته شود یا خیر. اگر جواب بله است بایستی نرخ مشارکت تعریف شود.
نرخ مشارکت به نرخ حضور خودروهای خودران در شرایط ترافیک مختلط گفته میشود. ترافیک مختلف به ترافیکی اطلاق میشود که همزمان شامل حضور خودروهای با راننده و بدون راننده است. این موضوع از آن جهت اهمیت دارد که خودروهای خودران نمیتوانند به صورت آنی تمام خودروهای جریان ترافیک به خود اختصاص دهند؛ بنابراین بایستی نرخ مشارکت تعریف شود. نرخ مشارکت معمولا در بازه های 10 تا 25 درصدی تقسیم میشود. به عبارت دیگر تحقیقات فرض میکنند درصد حضور خودروهای خودران به صورت بازه های 10تا 25 درصدی در طول فرایند شبیه سازی افزایش مییابد.
3.سطوح مدلسازی خودروهای خودران
در شبیه سازی جریان ترافیک سه سطح مدلسازی وجود دارد که در ادامه به شرح آنها پرداخته میشود.
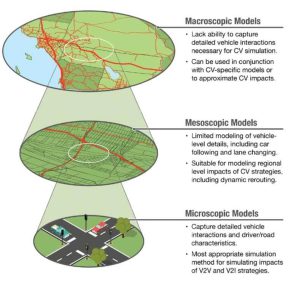
مدلسازی خرد نگر
این نوع مدلسازی در مقیاس کوچک دسته بندی میشود و به دنبال ارزیابی رفتار رانندگان به صورت تکی است. این نوع مدل با استفاده از الگوریتم های تغییر خط و دنبال کردن خودرو، رفتار راننده و مسیر حرکت خودرو را در بازه های زمانی بسیار کوچک شبیه سازی میکند.
مدلسازی کل نگر
بر پایه روابط حاکم بر تئوری جریان ترافیک (روابط بین سرعت، جریان و چگالی) به مدلسازی ترافیک در ابعاد شبکه میپردازد. در این نوع مدلسازی به جزئیات حرکت بین وسایل نقلیه پرداخته نمیشود. این نوع مدلسازی از نوع مدلسازی در مقیاس بزرگ است به عنوان مثال میتوان به شبکه آزادراهی، شبکه خیابان های اصلی و یا سیستم بزرگراهی اشاره کرد.
مدلسازی میان نگر
این نوع مدلسازی در حقیقت بین دو مدلسازی نامبرده شده در بالا است. از این نوع مدلسازی برای ارزیابی حرکت گروهی وسایل نقلیه استفاده میشود. در شکل پایین مقایس های مختلف مدلسازی جریان ترافیک مشخص شده است.
علت ساخت خودروهای خودران
روزانه در سراسر جهان، افراد زمان بسیاری را به جابهجایی و سفرهای درون شهری اختصاص میدهند. بخشی از این سفرها توسط وسایل نقلیه عمومی و بخشی دیگر توسط وسایل نقلیه شخصی انجام میگیرد. قطعا همه افراد بهدنبال سفری ایمن و راحت هستند؛ اما عواملی این ایمنی را بهخطر میاندازند. خودروهای خودران فناوریهایی هستند که موجب افزایش امنیت و راحتی سفرهای درون شهری شما میشوند. از سالهای گذشته محققان و شرکتهای خودروسازی برای توسعه این فناوریها بهصورت گسترده تلاش میکنند. نتیجه این تلاشها،طراحی و تولید ماشینهای هوشمند و خودران است که با تکنولوژیهای پیشرفته میتوانند امنیت افراد را درهنگام رانندگی تضمین کنند.

دلایل تولید خودروهای خودران
این فناوریها نیازمند زمینههای مناسب برای سرمایهگذاری و تولید انبوه هستند؛ همچنین باید تجهیزات و تکنولوژیهای پیشرفتهای برای ساخت آنها بهکار رود. بنابراین دلایل متعددی برای تولید آنها وجود دارد.
دلایل اقتصادی
امروزه یکی از مهمترین عوامل در خرید یک خودرو هزینههای آن است. این هزینهها شامل قیمت خرید، هزینههای تعمیر و بیمه میشود. از این رو این خودروها بهگونهای طراحی شده اند که از نظر اقتصادی، مقرونبهصرفه باشند.
بهرهبرداری
درواقع معمولاً از طول عمر اتومبیلها بهطور کامل استفاده نمیشود. بهطوریکه فقط از ۴ درصد عمر آنها استفاده میشود و مابقی ۹۶ درصد، در پارکینگها میگذرد. خرید اتومبیل یکی از روشهای سرمایهگذاری افراد در دنیا است که اغلب هم مورد استفاده قرار نمیگیرند. پس یک وسیله گرانقیمت و باارزش دردسترس افراد است که در بیشتر مواقع هم از آن استفاده نمیشود. همچنین نیاز به تعمیرات گوناگون و دورهای ندارند و هزینههای تعمیرات نیز کاهش مییابد.
هزینه
در دنیا بسیاری از شرکتها خدمات حملونقل را به مردم ارائه میدهند. حال اگر به خدمات ارائه شده شرکتهایی مانند Uber و Lyft نگاه کنیم متوجه میشویم که به ازای هر کیلومتر، ۵۰ درصد هزینهها شامل رانندهها میشود. اما اگر راننده را از این خدمات حذف کنیم و سوخت الکتریکی را برای اتومبیلها درنظر بگیریم؛ تمام هزینهها به مقدار قابلتوجهی کاهش مییابند که از مزایا این اتومبیلها بهشمار میروند.
ضمیمه کردن خدمات
یکی دیگر از دلایلی که شرکتهای فنآوری را به سمت تولید این ماشینها سوق میدهد، ضمیمه کردن خدمات مختلف است. درهنگام استفاده از این ماشینها، رانندگانی که رانندگی نمیکنند یا نقش کمی در کنترل ماشین دارند؛ میتوانند درباره ارسال و یادآوری اطلاعات از این سیستمها کمک بگیرند. بهعنوان مثال سیستمهای مختلفی وجود دارند که توانایی گفتوگو با راننده و دنبال کردن بحث را دارند. همچنین امکان آگاهی از رستورانها یا کافههایی که خدمات خوبی ارائه میکنند با استفاده از این سیستم وجود دارد. شرکتهای فنآوری میتوانند علاوهبر جمعآوری مشخصات مسافران، برای جمعآوری اطلاعات مختلف دیگر اقدام کنند.
راحتی در سفر کردن
ترافیکهای سنگین یکی از رایجترین مشکلات رانندگی در شهرهای پرجمعیت بهحساب میآید. در بسیاری از مواقع افراد درهنگام رانندگی با ترافیکهای سنگینی مواجه میشوند و ساعتها درگیر آن میشوند. برخی از افراد ترجیح میدهند تا در زمان ترافیک کتاب بخوانند، فیلم ببیند، درصورت امکان به کارهای عقب افتاده خود برسند یا بخوابند. خودرهای خودران این امکان را برای رانندگان بهوجود میآورند. استفاده کنندگان از ماشینهای خودران میتوانند در وقت خود صرفهجویی کرده و از اتلاف زمان جلوگیری کنند تا به علاقهمندیهای خود برسند.

ازبین رفتن نیاز به راننده
امروزه در سراسر دنیا وسایل حملونقل عمومی بدون راننده دراختیار شهروندان قرار گرفته است. این مورد میتواند به کاهش هزینهها نیز کمک کند؛ در ازای پرداخت هزینه به رانندگان، این بودجه صرف تمرکز بر امنیت، سرعت و خدماترسانی بهتر میشود. که میتواند موجب افزایش کیفیت این خودروها شود و موارد استفاده از آنها را افزایش دهد.
کاهش تصادفات
در سالهای اخیر درصد بالایی از تصادفات جادهای و شهری بهدلیل اشتباهات یا عکسالعملهای کند رانندگان اتفاق افتادهاند. این فناوریها با هدف کاهش تصادفات طراحی و تولید میشوند. هوش مصنوعی بهکار رفته در آنها میتواند همانند تمام انسانها تصمیم بگیرد و رانندگی کند. البته خودروسازان تلاش میکنند تا سرعت تصمیمگیری و عکسالعمل این سیستم را نسبت به انسانها کاهش دهند. امکان تشخیص اشیا و افراد توسط هوش مصنوعی وجود دارد که اطلاعات از طریق سنسورها، دوربینها و حسگرها دریافت میشود.
دوری از ترافیک
بسیاری از شرکتها و کمپانیهای خودرو در تلاش هستند تا زمینه تولید انبوه و افزایش تعداد این فناوریها را در سطح شهر ایجاد کنند. به کمک آنها از ماندن در ترافیک و پارک کردن خودرو در فاصلههای زیاد جلوگیری میشود. اهمیت این مورد زمانی بیشتر میشود که زمان زیادی برای رسیدن به محل کار، محل قرار یا مکانهای دیگر نداشته باشید.
4 مرحله اساسی در سیستم اتومبیلهای خودران

1. درک محیط
اولین مرحله درک محیط است که بهواسطه رادار، لایدار، موقعیتیاب، بینایی ماشین و تجهیزات دیگر انجام میشود. با استفاده از این تجهیزات اتومبیلها میتوانند با محیط بیرون ارتباط بگیرند که این فرایند با الگوبرداری از سیستم بینایی انسان در رایانه شبیهسازی میشود.
2.سیستم تصمیمگیری
این سیستم با ارائه الگوریتم و براساس اطلاعات و دادههای دریافتی از سیستم درک محیط، تصمیم میگیرد که اتومبیل در کدام مسیر و با چه سرعتی حرکت کند. تصمیمگیری حرکت خودرو با شبیهسازی بهینه کنترل سیگنالهای طولی و عرضی خودرو امکانپذیر است.
3.سیستم کنترل و فرمان
این قسمت با دادههای سیستم تصمیمگیری، تصمیم میگیرد چه اتفاقاتی در بخشهای مکانیکی و دینامیکی خودرو انجام شود. درنهایت این تصمیمات به بخش بعدی ارسال میشود.
4.عملگرها
عملگرها که نقش عملی راننده را ایفا میکنند و فرمان نهایی را در خودرو اجرا میکنند؛ باید اتومبیل را در شرایط مختلف هدایت کنند. این شرایط شامل جادههای بارانی، یخزده و… میشود. از این رو استفاده از قوانین کنترلی تطبیقی یا مقاوم و هوش مصنوعی الزامی است. بهعبارت دیگر بخش اول چشم راننده، بخشهای دوم و سوم ذهن راننده و بخش آخر دستها و پاهای راننده محسوب میشوند که اتومبیل را هدایت میکنند.
اثرات خودروهای خودران
1.ظرفیت و بازده
وسایل نقلیه کنترل شده با کامپیوتر میتوانند حداکثر عبور جریان ترافیک را 200 تا 300 درصد افزایش دهند. در آزمایشی در سال 1997، محققان تخمین زدند که فناوری های ارتباطی بین وسایل نقلیه میتواند منجر به افزایش ظرفیت هر خط شوند و ظرفیت به میزان 4300 وسیله نقلیه در ساعت برسد. این در حالی است که ظرفیت در حالت بدون ارتباطات بین وسایل نقلیه برابر با 2000 وسیله نقلیه در ساعت بوده است. حرکت گروهی کامیونها در اروپا با استفاده از سیستم CHAUFFEUR نشان داد که امکان افزایش ظرفیت به میزان 8 درصد وجود دارد.
2.مصرف سوخت و انتشار آلاینده ها
آزمایش های تونل باد نشان داد در اثر وجود حرکت های گروهی وسایل نقلیه، نیروی مخالف مؤثر باد به میزان 50 درصد کاهش پیدا میکند و این موضوع باعث کاهش 20 تا 25 درصدی انتشار آلاینده ها و مصرف سوخت میشود. حرکت گروهی کامیون ها در سیستم CHAUFFEUR تا حدود 20 درصد کاهش مصرف سوخت را در پی دارد. تحقیق دیگری نشان داد با وجود حرکت های گروهی به تعداد پنج وسیله نقلیه با فاصله طولی بین 8-5 متر مصرف سوخت به میزان 8 تا 15 درصد کاهش پیدا میکند.
حرکت گروهی کامیون ها به صورت گروهه ای سه تایی در ژاپن منجر به کاهش مصرف سوخت به میزان 8 %با سیستم کروز کنترل مشارکتی و کاهش مصرف سوخت به میزان 14 %و 16 %با رانندگی تمام خودکار شد. حرکت گروهی کامیونها به صورت گروه های سه تایی در نوادا که دارای توانایی ارتباطی بودند منجر به صرفه جویی در مصرف سوخت به میزان 5/4 %تا 4/18 %شد.
3.تصادفات
وزارت حمل ونقل ایالات متحده تخمین میزند که فناوریهای وسایل نقلیه دارای ارتباطات بین خودرویی می توانند 81 درصد از تصادفات خودروهای سبک را کاهش دهند یا از آنها جلوگیری کنند. تجزیه و تحلیل تصادفات از داده های ایالت کالیفرنیا در سال 2013 نشان داد که 78 درصد از تمام تصادفات را میتوان با فناوری های وسیله نقلیه خودران کاهش داد.
خودرو های خودران و امنیت آنها
وسایل نقلیه خودران
90 ٪از تمام تصادفات ترافیکی ناشی از خطای انسانی است، راننده وسیله نقلیه تصمیم اشتباهی را در زمان اشتباه میگیرد. که منجر به تصادفات فاجعه آمیز و اغلب اوقات منجر به مرگ می شود. این روی دادها می توانند تأثیر فاجعه باری نه تنها بر افراد درگیر و خانواده هایشان، بلکه بر جامعه گسترده تر داشته باشند. با توجه به اینکه سالانه 190 نفر در تصادفات ترافیکی در جاده های ایرلند کشته میشوند، بدون توجه به بیش از 5000 برخورد منجر به جراحت و مواردی که گزارش نشده اند، انگیزه زیادی برای حذف خطاهای منجر به این رویدادها وجود دارد.
علاوه بر هزینه های انسانی در اقتصاد نیز موثر است، جایی که برخوردها باعث تأخیر قابل توجه ی برای عموم مسافران میشود، ازدحام و عقب ماندگی ایجاد میکند و مانع از تحویل کالا و خدمات میشود.
AV وسیله نقلیه ای است که میتواند بدون نیاز به انسان، تصمیم بگیرد و اقداماتی مانند فرمان یا ترمزگیری را انجام دهد. مداخله سطوح مختلفی از استقلال وجود دارد که منعکس کننده فناوری موجود در بازار و ترکیبی از ویژگی های به کار رفته است. نمودار زیر این سطوح و معنای آنها را از دیدگاه راننده انسانی نشان میدهد. فناوری کنونی بین 5.2 تا 4 بالغ شده است. دستگاههای AV در سطح جهانی توجه زیادی را به خود جلب کرده اند، به طوری که هم کشورها و هم شرکت ها میلیاردها دلار در ارائه خدمات زیرساختی و داده سرمایه گذاری میکنند تا موفقیت آنها را تضمین کنند.
زیر ساخت های مورد نیاز
زیر ساخت های مورد نیاز تعجب آور نیست که به طور کلی به زیرساخت های فیزیکی مانند جاده ها، پل ها و پیاده روها نیاز داشته باشیم. با این
CAVها نه تنها به زیر ساخت فیزیکی بلکه به زیرساخت دیجیتال نیز نیاز دارند. بسیار مهم است که ما به درک درستی از تغییرات مورد نیاز در برنامه ریزی و طراحی زیرساخت برسیم. از تغییرات میتوان به جمله عرض جاده ها، روشنایی خیابان ها، موانع ایمنی، علائم، پارکینگ و سیستم ها ی حمل و نقل هوشمند اشاره کرد. ما همچنین باید در نظربگیریم که شبکه جاده ها و چشم انداز آینده چگونه خواهد بود و واکنش اشخاص به تغییرات چه خواهد بود.
در دنیای CAV ها، وسایل نقلیه با یکدیگر تعامل دارند و داده ها را نه تنها با یکدیگر بلکه با زیرساخت هایی مانند چراغ های راهنمایی و شمارش معکوس عابر پیاده نیز به اشتراک میگذارند. برای اینکه این اشتراک گذاری قابل اعتماد باشد، باید هم داده های مورد نیاز و هم انتقال آن را به طور کامل در نظر بگیریم.
خودرو های متصل
خودرو متصل از سه حوزه تشکیل شده است:
1 -وسیله نقلیه، متشکل از شبکه داخل خودرو و ECU
2 -پورتال در شرکت خودروسازی، ارائه خدمات به وسیله نقلیه
3 -پیوند ارتباطی بین وسیله نقلیه و پورتال.
این شبکه داخل خودرو را می توان به زیرشبکه های فناوری های مختلف سیستم bus تقسیم کرد. شبکه کنترل کننده منطقه (CAN) شبکه اتصال محلی (LIN ،)حمل و نقل سیستم های رسانه گرا (MOST ) و FlexRay .شبکه های فرعی از طریق ECU های پورت های ویژه به یکدیگر متصل میشوند. از سه حوزه بالا، ما بر روی خودرو تمرکز خواهیم کرد.
چالش ها
برخی الزامات کلی وجود دارد که چالش های ویژه ای را برای ایمن سازی شبکه داخل خودرو ایجاد می کند:
- محدودیت ECU ،یعنی ECU قدرت پردازش و حافظه محدودی دارد.
- امکانات محدود هزینه اضافی برای دستگاه های متصل، راه حل های امنیتی جدید باید بسیار مقرون به صرفه باشند.
- طول عمر محدود، وسیله نقلیه ممکن است برای 10 -15 سال استفاده شود.
کلام آخر
باوجود اینکه در شهرهای مختلف دنیا از این اتومبیلها رونمایی و تعداد محدودی از آنها در سطح شهر عرضه شده است؛ و در ایران هم مطالعات و تحقیقات برای توسعه این خودروها در حال انجام است؛ و درحال حاضر برنامهریزیهایی برای هوشمندسازی صنایع مادر و ورود به دنیای ماشینهای پیشرفته در ایران انجام شده است. انتظار میرود تا در سالهای پیشرو خودروهای خودران بهصورت گسترده و در تعداد انبوه در ایران تولید شوند.


سوالات متداول
فناوری های خودروهای خودران چه اثراتی جنبه های مختلف حمل و نقل داشته است؟
همان طور که گفته شد فناوری خودروهای خودران در دو دهه اخیر بسیار گسترش پیدا کرده اند و اثرات مختلفی بر جنبه های مختلف حمل ونقل و ترافیک از جمله اثرات بر پارامترهای عملکردی، ایمنی، زیست محیطی و اجتماعی را به همراه داشته است.
خودروهای خودران طبق تقسیم بندی انجمن مهندسان خودرو به چند دسته تقسیم میشوند؟
خودروهای خودران طبق تقسیم بندی انجمن مهندسان خودرو به شش سطح تقسیم بندی میشوند. در سه سطح اولیه (سطوح صفر، یک و دو) راننده بایستی به صورت ناظر همواره هوشیاری خود را حفظ کرده تا در مواقع موردنیاز کنترل وسیله نقلیه را به دست گیرد. در سه سطح بعدی (سطوح سه، چهار و پنج) راننده دخالتی در هدایت وسیله نقلیه ندارد حتی اگر روی صندلی راننده نشسته باشد.